


Grant în cadrul Programului Național PNCDI III, P3- Proiect experimental demonstrativ
Număr Proiect: PN-III-P2-2.1-PED-2019-4995


Grant în cadrul Programului Național PNCDI III, P3- Proiect experimental demonstrativ
Număr Proiect: PN-III-P2-2.1-PED-2019-4995
Perioada de desfășurare: 03.08.2020 – 02.08.2022
Detecția și urmărirea traiectoriei persoanelor sunt capacități importante pentru prelucrarea automată în multiple aplicații bazate pe viziune computerizată. Cu toate acestea, aceste sarcini sunt destul de dificil de realizat autonom și, deși au fost obținute rezultate semnificative, ele reprezintă o provocare tehnologică chiar și la ora actuală. Urmărirea persoanelor, spre deosebire de sarcinile de recunoaștere sau interpretare, este dificilă atât din punct de vedere al predicției traiectoriei, cât și din punct de vedere al identificării și etichetării situațiilor corecte.
Obiectivul principal al proiectului PETRA este dezvoltarea unei platforme software care să permită dezvoltarea de aplicații care necesită detecția și urmărirea persoanelor în medii reale. Proiectarea și implementarea platformei și a setului de algoritmi asociați pentru detecția și urmărirea persoanelor vor fi ușor de utilizat și integrat în sarcinile efectuate de roboții sociali în spații închise și în sarcinile în spații deschise, cum ar fi cazul detecției și urmărirea pietonilor. Provocarea științifică și tehnologică a proiectului este să pornim de la realizările noastre curente privind detecția și urmărirea persoanelor în contextul interacțiunii om-robot și a conducerii autonome pentru a dezvolta și implementa soluții noi bazate pe abordări de învățare profundă. Una dintre provocările proiectului este să testăm pe larg implementările pe mai multe benchmark-uri dificile, dar și pe propriile noastre seturi de date, și să obținem rezultate mai bune decât stadiul actual în domeniu.

Unitatea Finantatoare la nivel National: UEFISCDI

Detecția și urmărirea persoanelor este o capacitate valoroasă pentru aplicațiile care utilizează vedere computerizată. Cu toate acestea, astfel de sarcini sunt dificil de realizat în mod autonom și, deși s-au obținut rezultate semnificative, acestea sunt încă o provocare tehnologică majoră. Urmărirea persoanelor, spre deosebire de alte sarcini de recunoaștere și interpretare, este dificilă atât din punctul de vedere al detecției și predicției traiectoriei unei peroane, cât și din cel al identificării instanțelor reale. Persoane parțial vizibile și obiecte care seamănă foarte mult între ele impun ambiguități intrinseci, care sunt o provocare în aplicații din lumea reală.
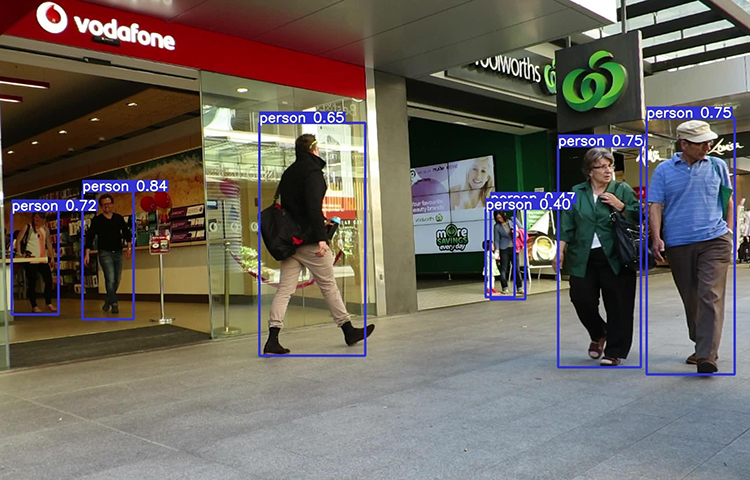
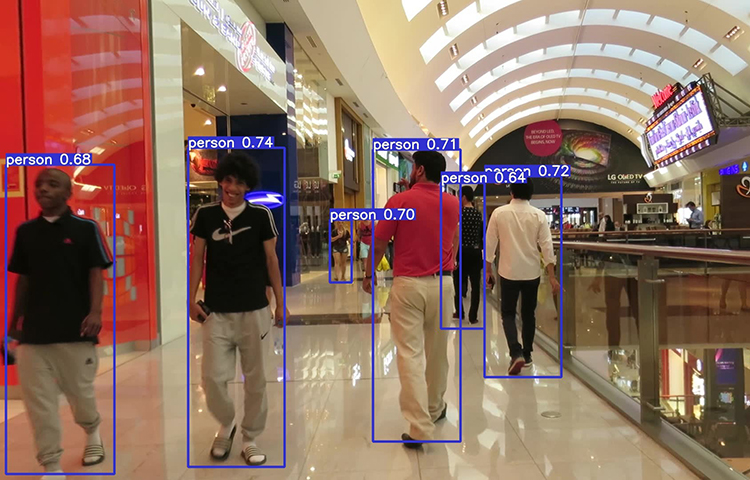
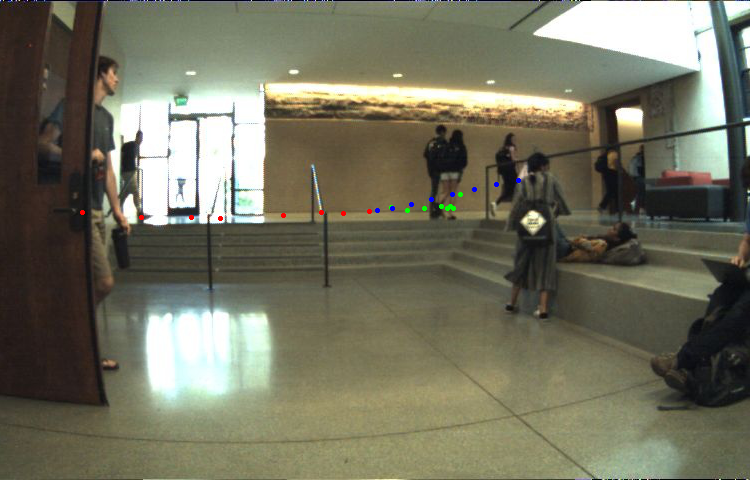
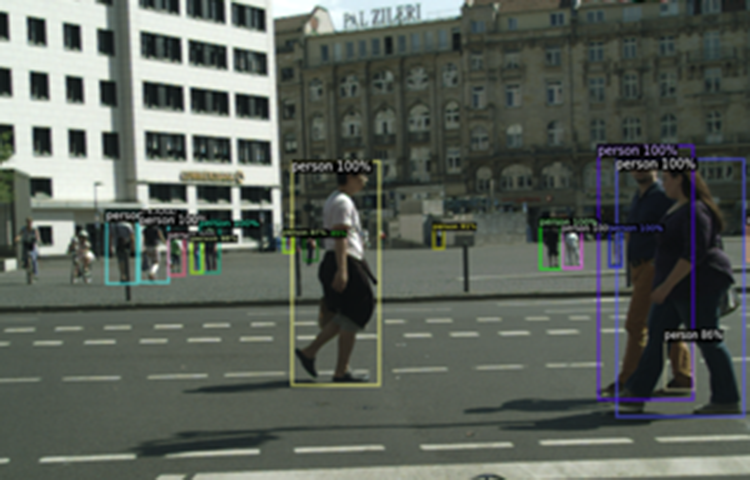
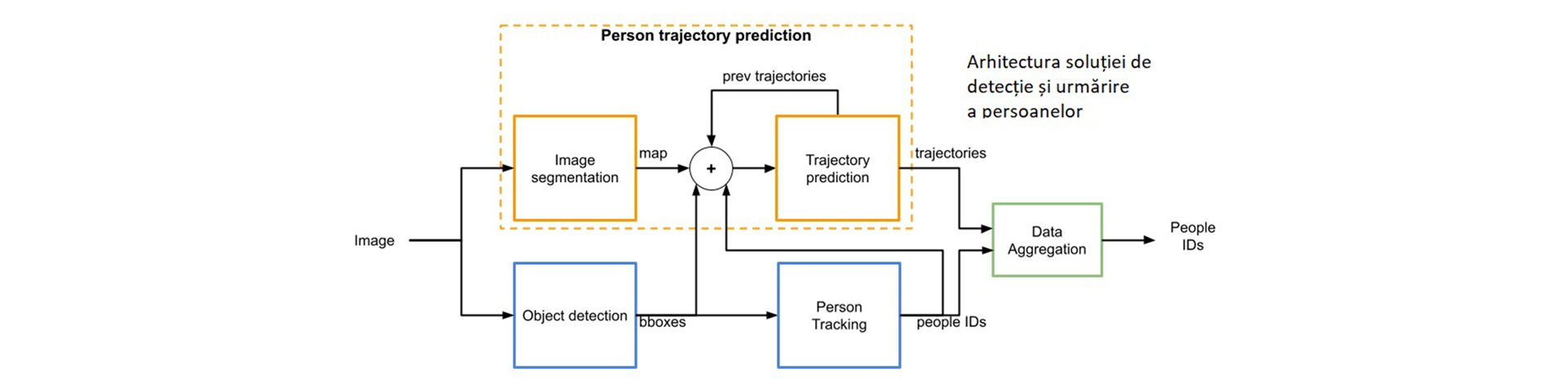
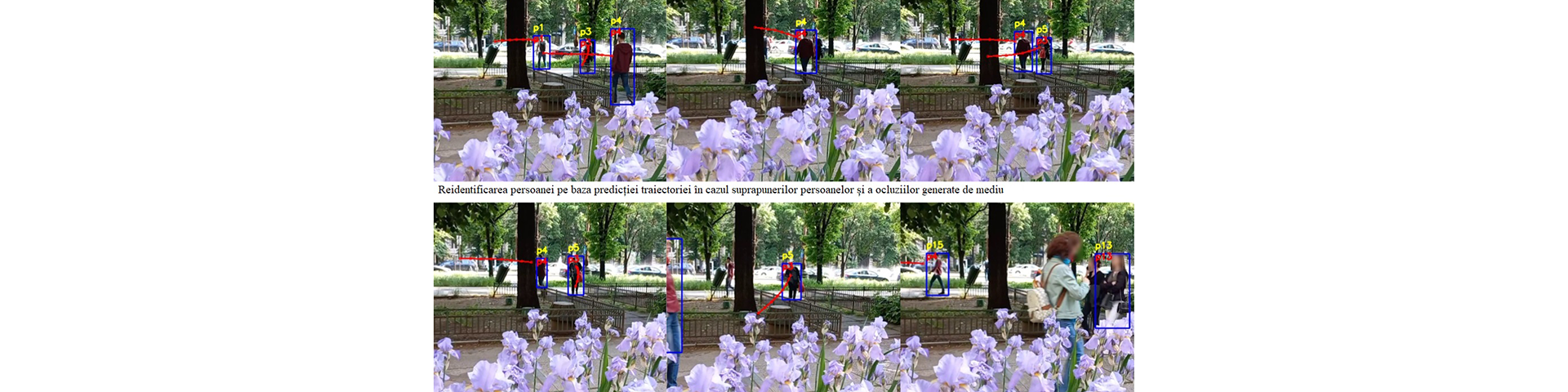
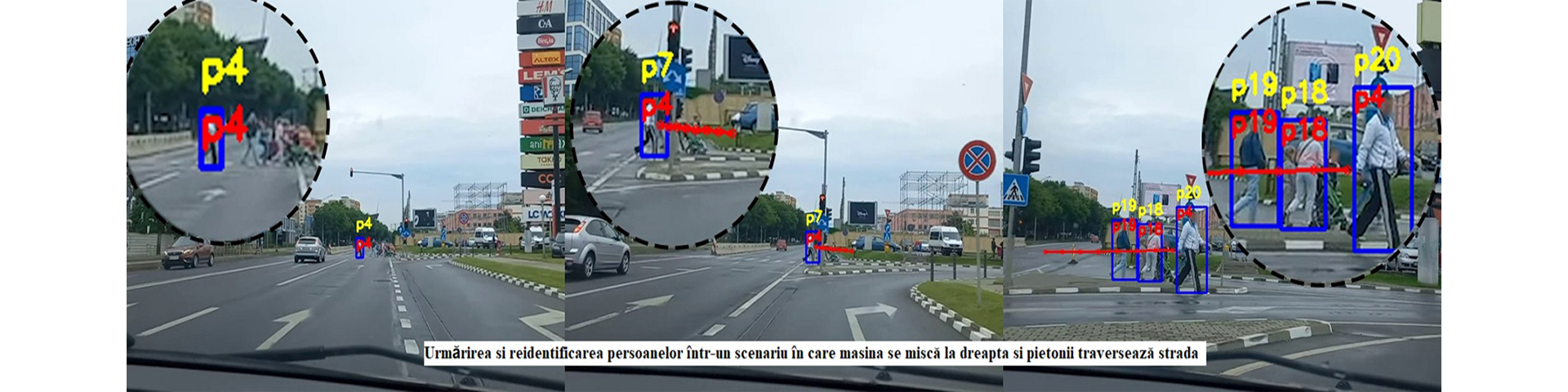
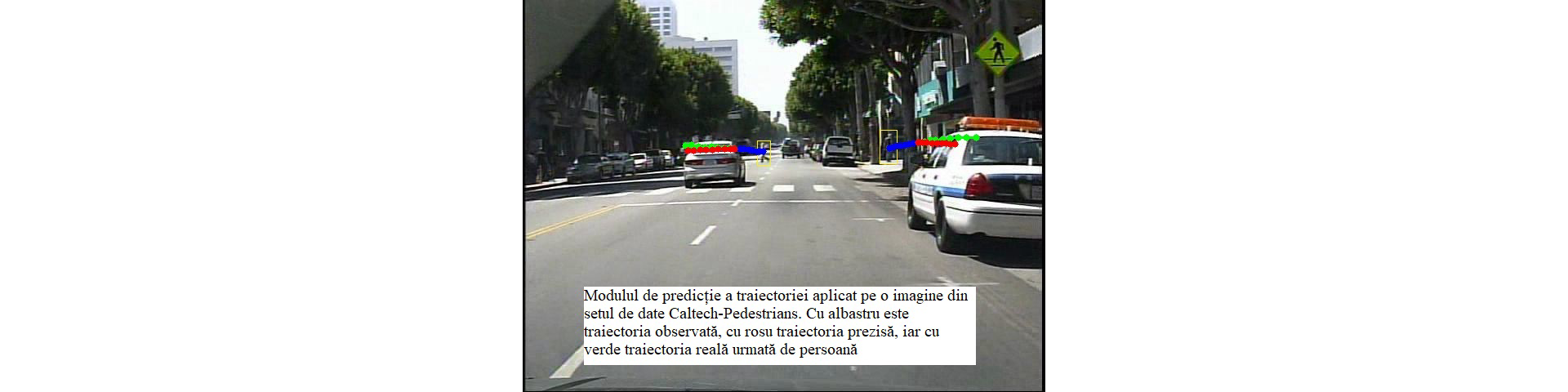
În cadrul proiectului PETRA am dezvoltat o nouă tehnologie de urmărire a persoanelor bazată pe algoritmi care utilizează rețele neurale adânci (deep learning networks) care cuplează urmărirea persoanelor cu predicția traiectoriei acestora. Am validat soluția propusă în cadrul a două tipuri de scenarii: scenarii de detecție și urmările a persoanelor de către un robot umanoid, potrivite pentru aplicații ce include roboți sociali, și scenarii de detecție și urmărire a pietonilor, pentru aplicații de conducere autonomă a vehiculelor. Soluția propusă este robustă, având capacitatea de trata și cazuri mai dificile cum ar fi multiple persoane în secvența video sau persoane care în timpul mișcării sunt parțial sau total acoperite de obstacole, pentru ca apoi să reapară în secvența video.
Algoritmii dezvoltați sunt eficienți, flexibili și pot fi cu ușurință integrați în aplicații ce implică roboți sociali, de exemplu asistarea persoanelor cu nevoi speciale sau a clienților din mall-uri sau expoziții, cât și în aplicații de conducere autonomă a vehiculelor pentru evitarea accidentelor.


Adina Magda Florea

Irina Mocanu

Alexandru Sorici

Mihai Trăscău

David Iancu

Mihai Nan