Grant within the National Program PNCDI III, P3- Demonstration experimental project
Project Number: PN-III-P2-2.1-PED-2019-4995


Grant within the National Program PNCDI III, P3- Demonstration experimental project
Project Number: PN-III-P2-2.1-PED-2019-4995
Deployment Period: 03.08.2020 – 02.08.2022
Detecting, tracking, and recognizing people is a valuable capability for machines. However, these tasks are quite difficult to be achieved autonomously and, although significant results have been obtained, they are still a major technological challenge. People tracking, unlike other recognition and interpretation tasks, is difficult both from the point of view of the recognition and prediction of trajectory, and from the one of the identifications of the ground truth.
The main objective of the PETRA project is the development of a software platform enabling the development of applications requiring people detection and tracking in real environments. The design and implementation of the platform and the set of supported algorithms for people detection and tracking will be such that they can be easily used and integrated in tasks performed by social robots in closed spaces and in tasks in open spaces, such as the case for pedestrian detection and tracking. The scientific and technological challenge of the project is to start from our current developments on people detection and tracking in the contexts of user-robot interaction and autonomous driving to develop and implement novel solutions based on deep learning approaches. One of the project challenges is to extensively test the implementations towards several difficult benchmarks, but also on our own data sets, and strive to achieve results better than current state-of-the-art.

National Financing Unit: UEFISCDI

Detecția și urmărirea persoanelor este o capacitate valoroasă pentru aplicațiile care utilizează vedere computerizată. Cu toate acestea, astfel de sarcini sunt dificil de realizat în mod autonom și, deși s-au obținut rezultate semnificative, acestea sunt încă o provocare tehnologică majoră. Urmărirea persoanelor, spre deosebire de alte sarcini de recunoaștere și interpretare, este dificilă atât din punctul de vedere al detecției și predicției traiectoriei unei peroane, cât și din cel al identificării instanțelor reale. Persoane parțial vizibile și obiecte care seamănă foarte mult între ele impun ambiguități intrinseci, care sunt o provocare în aplicații din lumea reală.
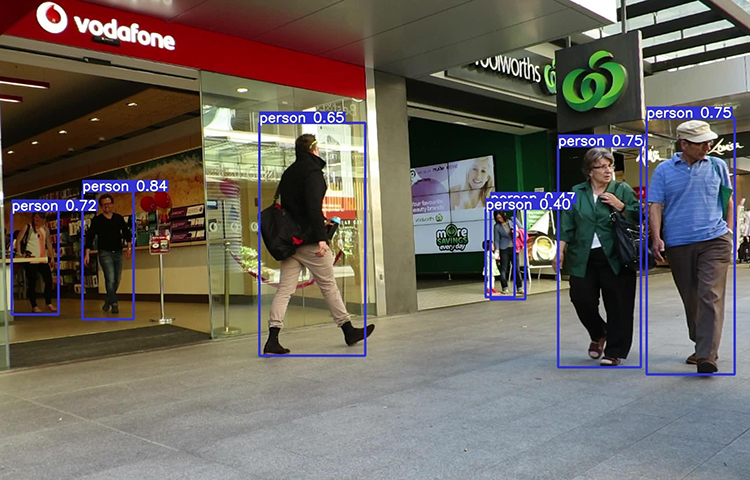
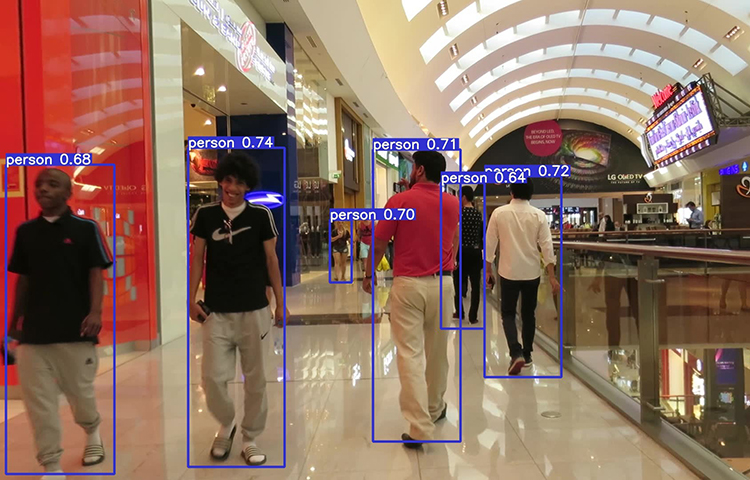
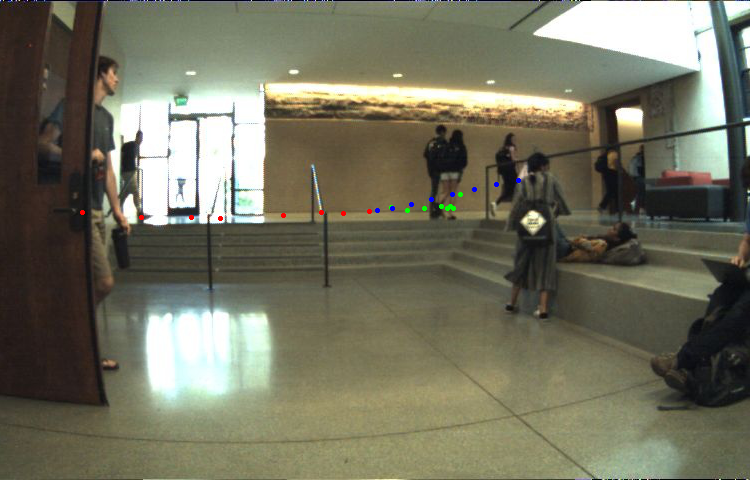
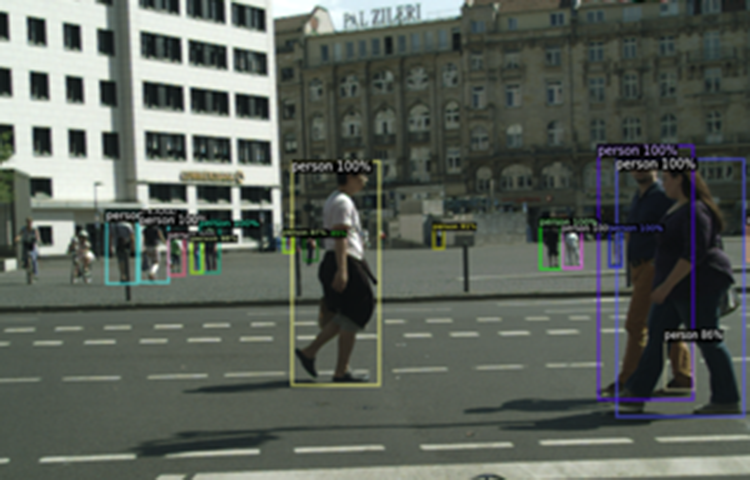
În cadrul proiectului PETRA am dezvoltat o nouă tehnologie de urmărire a persoanelor bazată pe algoritmi care utilizează rețele neurale adânci (deep learning networks) care cuplează urmărirea persoanelor cu predicția traiectoriei acestora. Am validat soluția propusă în cadrul a două tipuri de scenarii: scenarii de detecție și urmările a persoanelor de către un robot umanoid, potrivite pentru aplicații ce include roboți sociali, și scenarii de detecție și urmărire a pietonilor, pentru aplicații de conducere autonomă a vehiculelor. Soluția propusă este robustă, având capacitatea de trata și cazuri mai dificile cum ar fi multiple persoane în secvența video sau persoane care în timpul mișcării sunt parțial sau total acoperite de obstacole, pentru ca apoi să reapară în secvența video.
Algoritmii dezvoltați sunt eficienți, flexibili și pot fi cu ușurință integrați în aplicații ce implică roboți sociali, de exemplu asistarea persoanelor cu nevoi speciale sau a clienților din mall-uri sau expoziții, cât și în aplicații de conducere autonomă a vehiculelor pentru evitarea accidentelor.

Adina Magda Florea

Irina Mocanu

Alexandru Sorici

Mihai Trăscău

David Iancu

Mihai Nan